中國網/中國發展門戶網訊 黨的十八年教學夜報告明確提出,進步陸地資源開發才能,發展陸地經濟,保護陸地生態環境,堅決維護國家陸地權益,建設陸地強國。黨的十九年夜報告請私密空間求加速建設陸地強國。摸索和認識陸地需求包含水下機器人在內的多種陸地技術裝備,“十二五”“十三五”期間,國家重點安排了4500m級和11000m級深海技術裝備的研制;“十四五”規劃進一個步驟提出,要在深海、極地等前沿領域實施一批具有前瞻性、戰略性的國家嚴重科技項目。深海探測、陸地資源開發應用等已成為新興戰略性領域,關注深海、聚焦深海資源的開發已上升為國家戰略。
近年來,水下機器人(UUV)在陸地科學研討、陸地工程及戰略高技術等領域獲得了廣泛應用。凡是,水下機器人可分為自立水下機器人(AUV)和有纜遙控水下機器人(ROV)。AUV自帶動力自立飛行,可執行年夜范圍探測任務,但作業時間、數據實時性、作業才能無限。ROV依附臍帶電纜供給動力,水下作業時間長、數據實時,作業才能較強,但作業范圍無限;近年來發展的混雜式水下機器人—自立/遙控水下機器人(ARV)結合了AUV和ROV的優點,自帶動力,通過光纖微纜實現數據實時傳輸,既可實現較年夜范圍探測,又可實現水下定點精細觀測及輕作業。ARV是信息型AUV向作業型AUV發展過程中的出舞蹈場地現新型水下機器人。此外,水下滑翔機(glider)作為一種新技術平臺,適用于長時間、年夜范圍陸地環境觀測,近年來逐漸成熟。
水下機器人會議室出租能夠在極端陸地環境下任務,到達人類難以到達的海區,在摸索人類未知世界發揮越來越主要的感化。通過自立飛行把持、1對1教學導航定位通訊、動力動力推進、目標探測識別、機械手作業等高新技術的不斷衝破,水下機器人將有用推動在陸地環境觀測、深海資源探測和開發、深淵和極地的科學考核等領域的應用。
國外水下機器人發展現狀
國外水下機器人研討已有近70年的歷史。以american為代表的東方發達國家,先后研發了ROV、AUV、ARV,以及水下滑翔機等多種分歧類型的水下機器人,勝利用于深海資源調查、陸地科學考核、水下搜刮救撈等領域。
今朝全球有上百家ROV制造商,正在應用的ROV數以千計,並且還在繼續增長。此中american、加拿年夜、英國、法國和japan(日本)等發達國家在ROV領域處于領先位置,占據了絕年夜部門的商用市場份額。美、日、俄、法等國家已經擁有了從水面支撐母船到潛深3000—11000m的系列深海裝備,通過裝備之間的彼此支撐、聯一起配合業和平安救助等,能夠順利完成水下調查、搜刮、采樣、維修、施工和救撈等任務。
自20世紀50年月american華盛頓年夜學研制降生界上首臺AUV以來,其發展已經歷了60余年。20世紀90年月后期,隨著計算機技術發展和電子技術的日益成熟,A私密空間UV進進疾速發展階段,一批有影響的AUV相繼研制勝利并勝利應用,包含american的ABE、英國的Autosub、加拿年夜的Theseus。進進21世紀,AUV技術獲得了進一個步驟的發展,產品化的AUV不斷涌現,如amer然而,令她驚訝和高興的是,她的女兒不僅恢復了意識,而且似乎也清醒了過來。她居然告訴她,自己已經想通了,要跟席家icanHydroid公司的Blue個人空間fin系列、挪威Kongsberg公司的REM共享空間US系列和HUGIN系列、americanTeledyne公司的Gavia系列,標志著AUV進進了實際教學場地應用階段。
american、japan(日本)等陸地強國先后研勝利研制于分歧任務目標的ARV,其研討結果獲得國際廣泛認可。最具代表性的是american伍茲霍爾陸地研討所研制的HROV Nereus(“海神”號),具有AUV、ROV兩種作業形式,但需求在機器人下水前現場進行作業任務的換裝。自2011年起,在“海神”號基礎上,針對極地海冰調查,伍茲霍爾陸地研討所開始研制新的混雜型水下機器人Nereid UI,其最年夜任務水深2000m,攜帶20km的光纖微纜,并搭載多種生物、化學傳共享空間感器,可進行年夜范圍的冰下觀測和取樣等作業。
國外水下滑翔機技術的發展與應用重要集中于american、法國、英國和澳年夜利亞等國。20世紀90年月,american相繼開發勝利Slocum、Seaglider和Spray3種水下滑翔機,并持續進行技術攻關和應用。此外,歐洲和澳年夜利亞從21世紀開始專注于水下滑翔機的應用和協作技術的研個人空間討,并組建了各自的水下滑翔機觀測網絡。
總結國外水下機器人今朝發展的現狀,ROV已產業化并被廣泛應用,其發展更強調作業才能,以及進步其作業的自立性;由于水下動力、通訊和導航技術的約束,AUV仍然是當前研討的熱點并且正在經歷產品化的過程,系列化的產品不斷涌現;ARV技術在極地和深淵科考中的應用,有用拓展了AUV的應用領域;水下滑翔機作為低本錢年夜范圍陸地觀測設備,通過獲取海量數據,改變了人類對陸地的認識。水下機器人技術的發展,離不開需求牽引的廣泛應用,恰是不斷地應用,推動了水下機器人的技術進步。本文重點介紹我國水下機器人應用現狀。
我國水下機器人應用現狀
我國的水下機器人研討任務始于20世紀70年月末期。40多年來,我國水下機器人技術獲得了疾速發展。進進21世紀,在科學技術部、中國科學院、中國年夜洋礦產資源研討開發協會(以下簡稱“中國年夜洋協會”)等部門和組織的支撐下,以“潛龍/摸索”系列自立水下機器人、“海星/海龍/海馬”遙控水下機器人、“海斗”系列自立遙控水下機器人、“海翼/海燕”系列水下滑翔機等為代表的深海技術裝備勝利研制與應用,帶動了深海技術的進展,極年夜地進步了我國深海科學研討與深海資源勘察程度。中國科學院沈陽自動化研討所(以下簡稱“沈陽自動化研討所”)是我國最早開展水下機器人研討的單位,其研制的陸地技術裝備在必定水平上反應了中國水下機器人的研討進展。上面,以沈陽自動化研討所為例,介紹我國水下機器人應用現狀。
積極推動我國水下機器人在深海領域的持續應用
初步構建我國深海資源自立勘查的技術裝備體系
深海蘊躲著地球上遠未認知和開發的寶躲,是人類社會“採收,我決定見見席世勳。”她站起來宣布。謀求未來保存與發展的主要戰略新邊境。隨著人類社會的高速發展,對各種資源的需求不斷攀升,陸地資源面臨日益緊張的局勢,開發和應用深海礦產資源是人類可持續發小樹屋展的主要保證。深海礦產資源被認為是21世紀最主要的私密空間陸地礦產接替資源,作為人類尚未開發的寶地和高技術領域之一,已經成為各國的主要戰略目標。自2001年起,我國已經獲得了包含多金屬結核、多金屬硫化物、富鈷結殼等3種資源類型在內的5個年夜洋海底勘察合同區,成為資源種類最全、勘察合同區最多的國家之一,有用地拓展了國家戰略資源的新來源。這些礦區的後期開發申請及勘察合同簽訂后,都需求高精度、高效的共享空間探測裝備。
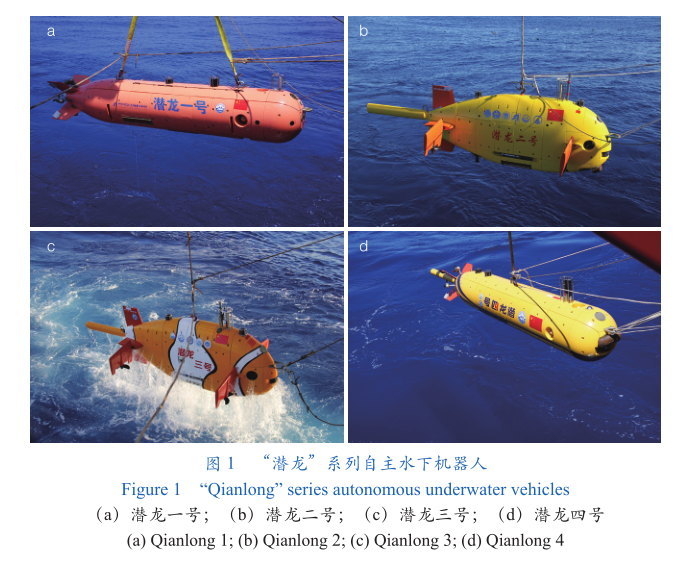
“十三五”期間,為滿足現有國際海底礦區勘查和新礦區圈定的急切需求,在國家重點研發計劃、中國年夜洋協會、國際海域資源調查與開發等項目標支撐下,沈陽自動化研討所聯合國內多家機構,霸佔復雜海底環境下的高精度導航、自立避障和穩定舞蹈場地飛行把持等多項關鍵技術,勝利研制了具有微地形地貌測量、海底拍照、水體異常探測、磁力探測等效能的深海資源自立勘查系統——“潛龍”系列深海AUV(圖1)。結合探測任務及海底環境,“潛龍一號”和“潛龍四號”設計為圓柱回轉體,適用于海底相對平展礦區;“潛龍二號”和“潛龍三號”設計為立扁魚型非回轉體,適用于復雜海底地形礦區。“潛龍”系列深海AUV用于多金屬結核、富鈷結殼、多金屬硫化物、自然氣水合物等多種深海資源的精細勘查,填補了我國深海資源自立勘查的空缺。“潛龍”系列深海AUV先后參加了10余次年夜洋科考航次,在承平洋、年夜西洋、印度洋等海域開展航次應用,累計下潛近百次,完成聲學探測測線超過5000km,聲學探測面積近2000km2。根據“潛龍”系列深海AUV獲取的海底多元數據,科學家教學對深海礦產資源的分布和成礦機理有了主要發現,為礦區區域放棄和后續資源開發供給了精準數據和模子。
初步構建我國陸地科學研討的自立觀測與作業技術體系
陸交流地科學是陸地技術發展的源泉,陸地技術是陸地科學創新的動力。歷史上,陸地學的創新都源自陸地調查觀測的結果,陸地科學的創新研討與陸地觀測和探測技術密不成分。在國家“863”計劃、國家重點研發計劃、中國科學院戰略性先導科技專項的支撐下,沈陽自動化研討所勝利研制出“摸索”系列自立水下機器人、“海星6000”遙控水下機器人、“海翼”系列水下滑翔機等裝備并獲得嚴重衝破,初步構建了面向陸地科學研討的自立教學場地觀測與作業技術體系,勝利在西承平洋、印度洋、南海、東海、黃海等海域開展應用,實現多水下機器人集群組網探測,開啟了我國陸地科考新形式。
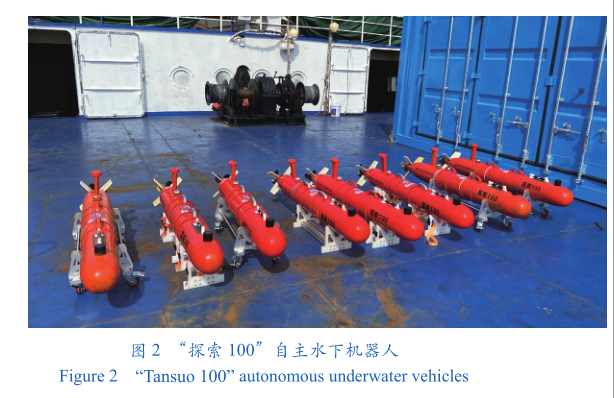
面向陸地科學研討需求,在國家重點研發計劃的支撐下,沈陽自動化研討所研制的“摸索100”是一套集聲學探測和光學觀測的50kg級模塊化便攜式AUV,實現了小批量制造,在衝破無人潛水器協同把持組網觀測等關鍵技術的基礎上,實現了基于聲通訊的多AUV組網觀測應用。2019—2020年,由多臺“摸索100”(圖2)組成的水下機器人組網觀測系統開展了多項陸地特征觀測海上試驗及示范應用。應用多臺AUV對年夜亞灣冷水團進侵和岬角渦旋現象進行觀測,初次獲得了年夜亞灣海域高辨別率的冷水團進侵和岬角渦旋精細結構特征,為研討上升流冷水對年夜亞灣底層生態系統的影響供給依據。在重點海區應用多AUV開展了協同熱點區域搜刮、編隊和溫躍層協同觀測試驗,以及陸地環境場自適應觀測應用示范,按實時規劃的航跡,對環境場變化最快的海域進行觀測,有用修改了該海域陸地系統形式,進步了陸地環境場預測精度。
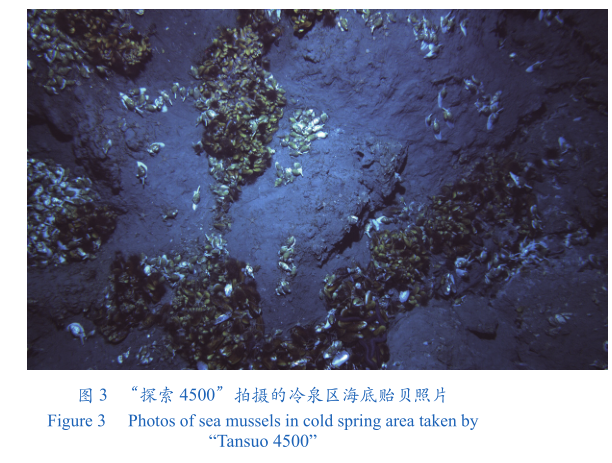
“摸索4500”是一套集成微地形地貌測量、海底拍照、熱液異常探測等傳感器的4500m級AUV,可在深海熱液活動區和冷泉區開展精細聲學探測、近底光學觀測。自2017年起,“摸索4500”屢次參加海上應用,包含冷泉區近底自立高精度探測,與“海馬”號ROV在南海北部陸坡海域開展聯合調查等任務。“摸索4500”在水體觀測和光學調查任務中,獲得大批水體觀測數據和高清海底照片,拍攝到具有“冷泉”特征的海底生物(圖3),為發現新的海底年夜型活動性“冷泉”,查明其分布范圍、生物群落及流體活動等奠基堅實基礎。
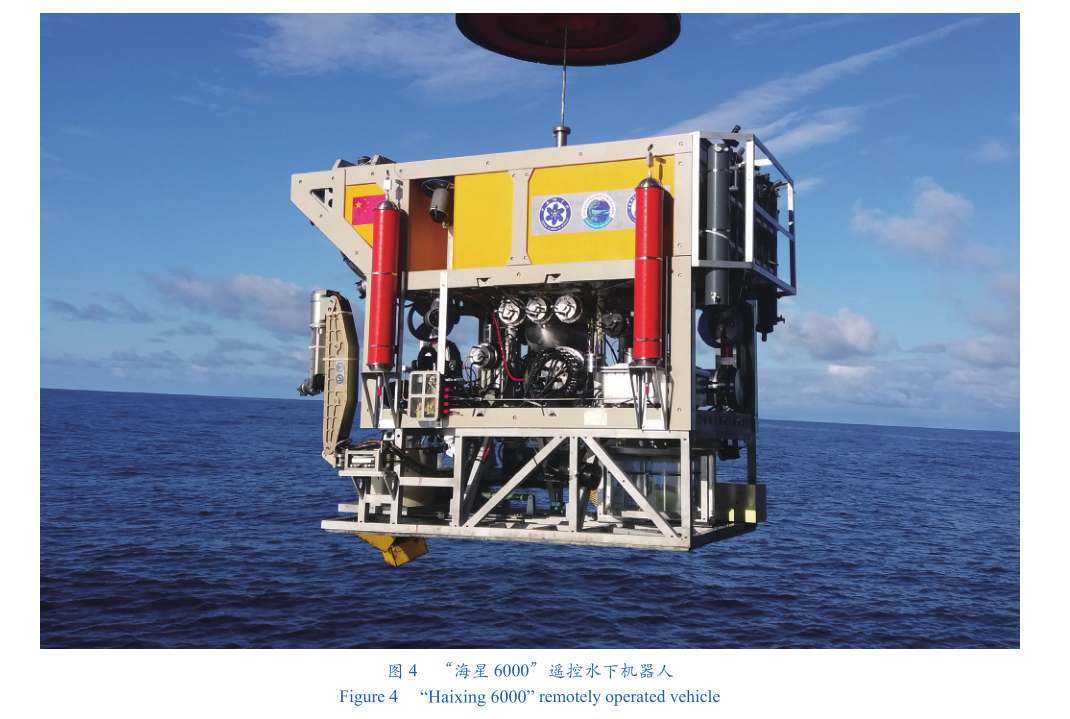
“海星6000”是我國首臺自立研發面向科考應用的6000m級ROV裝備,最高文業功率50HP①,最年夜任務深度6000m,采用全電動推進,搭載有七效能機械手、回轉生物汲取樣器、宏生物采集箱、沉積物取樣器、采水瓶等深海科考東西,具備浮力調節和水下廣播級高清視頻拍攝,可進行遠洋底采樣作業。在2018年科考航次中,“海星6000”(圖4)連續任務數小時,完成了6000m遠洋底飛行觀察、生物調查、海舞蹈教室底表層沉積聚舞蹈教室成物獲取、泥樣和水樣采集、模擬黑匣子搜刮打撈、標識物放置等,最年夜任務深度6001m,創造我國ROV最年夜潛深的紀錄。
水下滑翔機是一種依附浮力調整洋流驅動的新型水下機器人,無螺旋槳推進器,具有長續航力優勢。2009年,“海翼1000”在國內率先衝破海上飛行距離1000km的基礎上,2021年,“海翼1000”滑翔機海上飛行距離已經超過5000km,最長持續任務302天,觀測剖面數超過1500條,再次創造我國水下機器人續航力新紀錄。
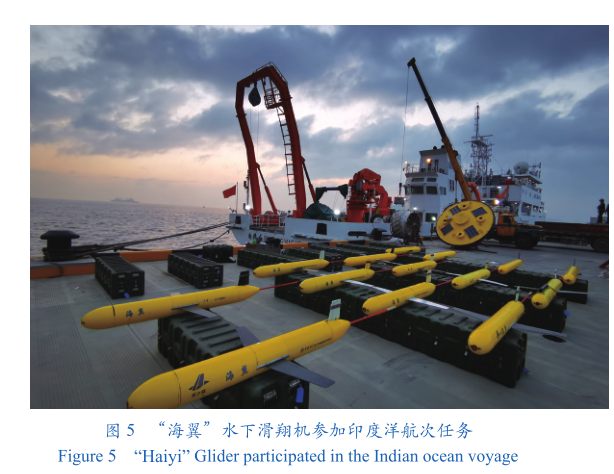
在單體機能晉陞的基礎上,“海翼”水下滑翔機連續開展陸地科考航次集群應用。2017年7月,初次開展多水下滑翔機協同觀測任務,創造了當時我國海上連續任務時間最長、飛行距離最遠、觀測剖面數最多的紀錄,為開展深海陸地瑜伽場地環境精細探測供給了系統解決計劃。2019年,11臺“海翼”水下滑翔機完成東南承平洋中標準渦旋(冷渦)綜合觀測。2020年,12臺“海翼”水下滑翔機(圖5)完成印度洋聯合陸地與環境研討計劃(JAMES研討計劃)夏季調查任務。2021年,8臺“海翼”水下滑翔機作為主要調查裝備參加了由中國科學院陸地研討所組織的國家天然科學基金共享航次計劃西承平洋科學考核實驗研討任務,勝利完成西承平洋集群觀測應用。“海翼”水下滑翔機的規模化應用,標志著我國水下滑翔機達到實用化應用程度。
周全引領我國水下說,因為如果新媳婦合適的話,如果她能留在他們裴家,那她一定是個乖巧懂事又孝順的兒媳。機器人在深淵領域的創新應用
近年來,深淵科學正成為國際地球科學尤其是陸地科學的最新前沿領域。隨著深淵探測技術瓶頸被慢慢衝破,深淵科學研討成為我國占領國際陸地科學研討制高點的主要機會,對我國陸地科學事業的發展甚至國家整體科學創新實力的進步均發揮了主要的推動感化。
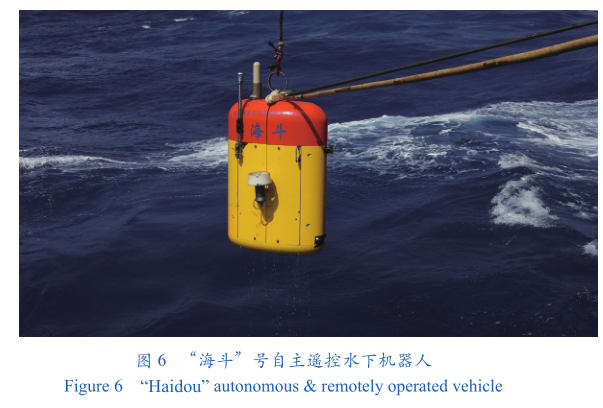
在中國科學院戰略性先導科技專項支撐下,沈陽自動化研討所自立研制的全海深無人潛水器關鍵技術驗證平臺——“海斗”號(圖6),是我國首臺下潛深度超過萬米的水下機器人,搭載有溫鹽深儀和高淨水下攝像機等傳感器和設備,最年夜任務水深11000m,可通過微細光纜進行通訊和視頻傳輸。2016—2018年,“海斗”號連續3年參加我國馬里亞納海溝深淵科考航次。“海斗”號總計下潛40次,此中11次到達萬米以下深度,最年夜下潛深度10905得出結論的那一刻,裴毅不由愣了一下,然後苦笑道。m,創造我國水瑜伽教室下機器人最年夜下潛及作業深度記錄,獲得我國首批全海深溫鹽深數據資料,實現我國初次全海深高清視頻直播。
2020年5月,在國家重點研發計劃支撐下,沈陽自動化研討所牽頭研制的“海斗一號”自立遙控水下機器人(圖7)在馬里亞個人空間納海溝勝利完成初次萬米海試與試驗性應用,最年夜下潛深度10907m,為我國開展深淵科考獲取了首批主要數據和樣品,填補了我國萬米級作業型無人潛水器的空缺。
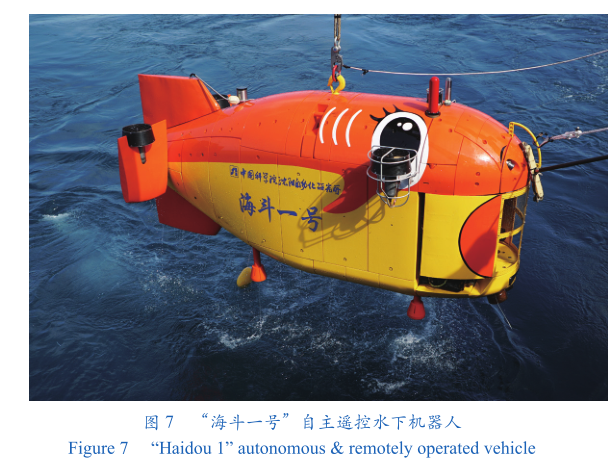
2021年10月,“海斗一號”再次開展馬里亞納海溝萬米科考應用,總計完成8次萬米深潛與作業,最年夜深度10908m,海底累計任務超30h、航程超30km、探測覆蓋面積超15km2,海底有用高清視頻時長超1個人空間5h,獲取了8個點位或區域的典範萬米深淵水文、生物、地質等數據或樣品。在國際上初次實現了對“挑戰者深淵”西部凹陷區的年夜范圍全覆蓋聲學巡航探測。“海斗一號”的勝利應用,表白了我國全海深無人潛水器正式跨進萬米科考應用的新階段,填補了當前國際上全海深無人潛水器萬米科考應用的空缺。
持續摸索我國水下機器人在極地的科考應用
南、北極對全球系統影響很是關鍵,其變化將直接影響到全球的氣候和陸地環境的變化。我國堅持南、北極科學考核是實現我國陸地防災減災、提醒全球氣候變化、動態陸地過程構成和演變機理的主要活動。水下機器人作為一種先進的運動平臺,搭載有關的觀測設備,可為極地陸地環境研討供給一種年夜范圍、連續的觀測手腕,推動南、北極科學研討的不斷發展。沈陽自動化研討所從2003年參加我國第二次北極科學考核以來,一向努力于推動水下機器人在極地科考中的摸索應用,相繼衝破極地密集海冰覆蓋平安收受接管、高緯度冰下導航等關鍵技術,研制和優化改革了一系列高技術水下機器人科考裝備,實現了1對1教學從冰底精細觀測、陸地環境年夜范圍觀測到遠洋底高精度探測的技術跨越。
實現海冰底部分觀測到海底年夜范圍探測的技術跨越
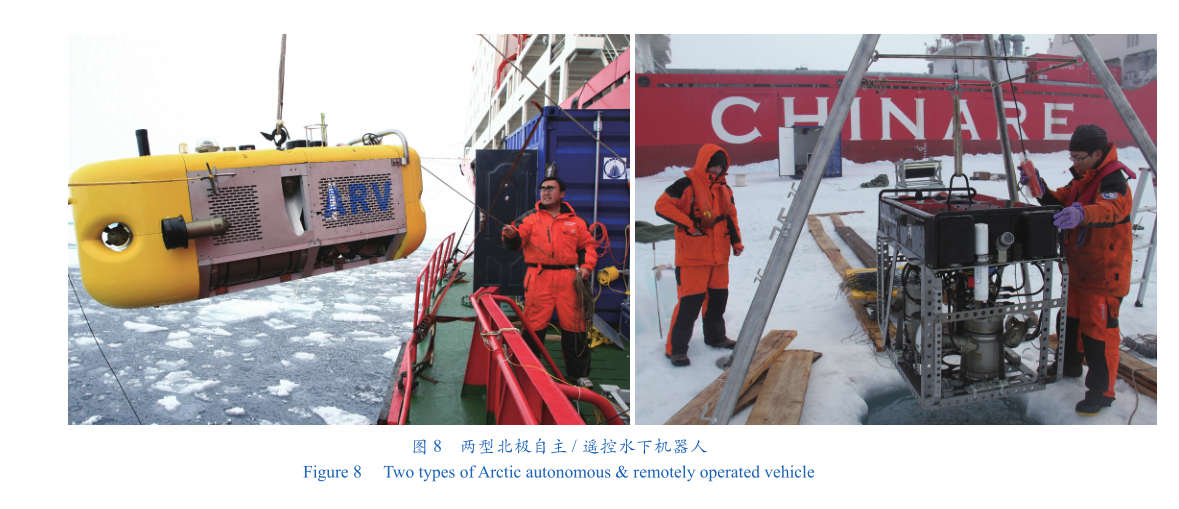
在國家“863”計劃支撐下,沈陽自動化研討所先后研制了兩型北極自立/遙控水下機器人(圖8),搭載海冰測厚聲吶、光通量探測儀、視頻觀測等設備,分別于2008年、2010年和2014年參加了我國北極科學考核,獲取了北極海冰底部物理特征和陸地環境等主要參數,實現了海冰厚度的區域高精度測量。
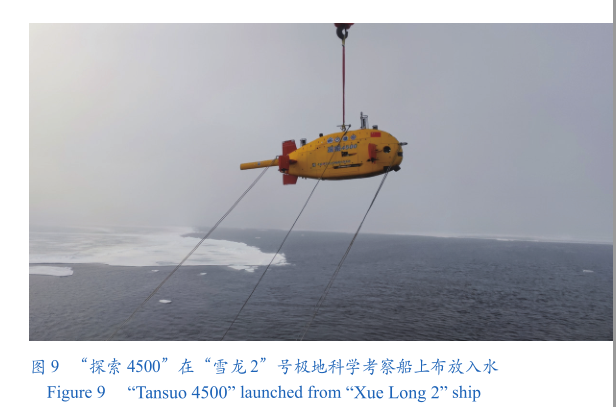
2021年,在中國第12次北極科考中,升級改革后的“摸索4500”在北緯85°海域勝利完成下潛探測(圖9),這是我國初次應用自立水下機器人完成北極高緯度海冰區遠洋底科考任務。“摸索4500”在4000m海底連續任務,勝利獲取了近底高辨別多波束、水文及磁力數據。其連續勝利下潛為我國不斷深化對北極洋中脊多圈層物質能量交換及地質過程的摸索和認知供給了主要數據資料。
實現我國水下機器人南極科考中初次示范應用
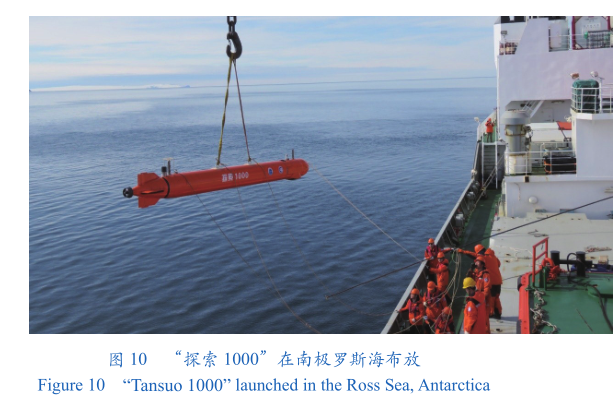
面向南年夜洋陸地環境調查任務,沈陽自動化研討所對“摸索1000”AUV進行了適應性改革,搭載溫鹽深、消融氧、濁度計、葉綠素等傳感器,以進步南極浮冰覆蓋的陸地環境適應性,于2019年和2020年先后兩次參加中國南極科考,為考核隊執行羅斯海多環境要素綜合調查供給了主要技術支撐。
在交流第35次南極科考中,“摸索1000”以南極極區陸地觀測應用為目標,獲得南極南緯75°海域陸地要素數據,驗證了南極環境下自立導航、穩定飛行、自立平安潛浮等效能和機能。在第36次南極科考中,“摸索1000”(圖10)水下連續任務35h,航程近70km,完成了近20個垂直剖面的連續觀測,獲得了海流、溫度、鹽度、濁度、消融氧及葉綠素等大批水文探測數據,驗證了我國自立水下機器人在極端陸地環境下開展科學探測的實用性和靠得住性,為我國水下機器人南極科學考核業務化運行奠基技術基礎。
近年來,在國家有關部門的鼎力支撐下,我交流國水下機器人技術研發與科考應用才能有了長足的進步,多項私密空間技術裝備填補了國內空缺,部門技術達到國際先進程度。面向深海資源勘查、陸地科學研討等國家嚴重需求,構建了譜系化技術裝備體系,引領了我國水下機器人裝備發展,實現了深海資源近底高精度聲光綜合探測、深海原位取樣及剖析探測、超長航程跨季度跨海域持續觀測及深淵海溝、南極和北極冰下探測,使我國具備了全海深探測與作業才能。在推動資料、流體和聲學等基礎學科發展的基礎上,不斷推動設立機器人陸地學、機器人測繪學等新型學科,帶動傳感器、動力、推進、導航、通訊等技術的進步,推動了我國深海科學研討與技術裝備研發的緊密結合。
水下機器人應用的勝利經驗表白,堅持走深海技術國產化途徑是我國的正確選擇。我國具有周全自立把握深海焦點關鍵技術的才能和潛力。堅持“戰略先導先行—嚴重研發任務攻關—示范應用”的路線,加強原創性、前瞻性、引領性科技攻關,把裝備制造緊緊抓在本身手里,從而為陸地強國建設發揮更高文用。
水下機器人應用瞻望與建議
面向未來更復雜、更極真個應用場景,需求進步單體水下機器人的智能化程度。通過開展新型動力資料、流體力學、把持導航等傳統學科與新興學科的跨學科穿插融會與技術創新,推動人工智能、年夜數據等信息技術與水下機器人技術的深度融會。人工智能方式已經在機器人視覺、移動機器人和工業機器人把持等方面展現出優越的環境適應性;隨著社會信息化不斷進步,年夜數據技術應運而生,且獲得了廣泛的應用。這些先進技術為水下機器人智能化供給了新思緒和新方式,例如:采用人工智能方式,可進步水下機器人的環境感知懂得、自立行為決策等智能化程度;采用年夜數據技術,可晉陞水下機器人安康自評估和修復、目標動態識別等才能。研發新一代智能水下機器人,進一個步驟完美水下機器人譜系化裝備體系,實現水下機器人向智能水下機器人的技術跨越,已成為水下機器人未來的發展趨勢。
面向未來更廣泛、更急切的國家需求,需求充足應用分歧類型水下機器人的技術特點,進步水下機器人集群綜合探測才能。衝破跨域集群多源實時感知、多源信息融會、即時決策響應等關鍵技術,實現機器人間的互聯互通,構建多機器人跨域集群協同探測與作業系統,為實現陸地應用供給前瞻技術儲備。
面向我國深海技術裝備的未來應用,從研發極端環境裝備、長期駐留科考、無人化科考、科學問題認知等方面,提出4點發展建議。
(1)研發適應極端陸地環境的深遠海科考裝備。面向南極、北極、深淵海溝等“三極”極端陸地環境應用的需求,進步自立環境感知、復雜環境適應、智能決策與自立保存等技術。研發超長航時陸地中小標準觀測系統、穿越北極自立水下機器人、環南年夜洋跨年連續觀測水下機器人、南極冰腔探測作業機器人等。通過水下機器人的技術進步,進步人類對陸地的認知程度,深入懂得陸地對全球氣候變化的影響。
(2)實現從航次型科考形式向深海長期駐留型科考形式的轉變。針對深瑜伽場地淵科考、深海礦產資源開采和深海油氣資源開發等需求,衝破陸地裝備駐留海底所需解決的長期防腐蝕、高速信息交互、高效動力補給、模塊化換裝、區域全場景監控及自立作業等關鍵技術。構建海底基站原位觀測與智能水下機器人年夜范圍觀測探測相結合的遠洋底科考體系,實現我國深海海底開展長期駐留連續科考與作業,深入懂得全球氣候變化對陸地海底環境的影響。
(3)實現從有人科考向無人化科考形式的轉變。面向更極端陸地觀測與探測的需求,周全晉陞陸地科考效力,構建高海況適應的少人化或無人智能船與水下機器人深刻融會的綜合科考體系。衝破高海私密空間況適應科考母船建造、水下機器人高效布放收受接管、遠程虛擬的水下科考作業操縱、自動化實驗室樣品處理與剖析等技術。通過技術進步,下降海上科考隊規模,晉陞海上無人裝備應用程度,減少惡劣海況對科考作業的影響。
(4)不斷進步陸地嚴重基礎性科學問題認識程度。依托智能船和陸地機器人觀測探測技術,不斷深化對臺風、內波、生態環境等陸地嚴重科學問題的認識。深化臺風極端陸地動態過程認識,構建臺風過程年夜氣-海氣界面-上層水體“跨界面”立體觀測系統;衝破臺風焦點區跟隨觀測瓶頸,提醒臺風-海氣耦合機制,進步預報精度,助力臺風災害預防。深化陸地中小標準過程極端陸地動態過程認識,構建中小標準過程“跨標準”長時間立體同步觀測系統;衝破全周期立體協同動態跟蹤觀測瓶頸,提醒內波生消機制,實現準回到家的第二天,裴毅就跟著秦家商團來到了祁州,只留下了從蘭府借來的婆婆和媳婦,兩個丫鬟,還有兩個療養院。確預報,晉陞平安保證才能。深化陸地生態環境極端動態過程認識,構建陸地生態環境“跨學科”四維立體長時續觀測系統;衝破全方位高效動態協同觀測瓶頸,提醒生態環境耦合機理,助力實現“雙碳”目標。
經過多年的技術攻關和示范應用,中國構建了譜系化的水下機器人的裝備體系,具備了開展分歧類型水下機器人的正向設計才能。站在新的歷史發展階段,推動產業化進程,加速構建水下機器人工業化體系,加強行業應用,盡力晉陞水下機器人對我國陸地經濟的貢獻度,為我國加速陸地強國建設作出更主要的科技貢獻。
(作者:李碩、李一平、趙宏宇,中國科學院沈陽自動化研討所機器人學國家重點實驗室 中國科學院年夜學;吳園濤,中國科學院嚴重科技任務局;李琛,中國科學院嚴重科技任務局。《中國科學院院刊》供稿)
發佈留言